Bij het artikel ‘Bentheimerbrug en Leeuwerikenbrug te Coevorden in BRUGGEN nr. 2 van 2017, is op pagina 22 een alinea weggevallen, zijn de verwijzingen in fig.11 verkeerd en is de fotoverantwoording niet goed. Voor de volledigheid wordt geheel pagina 22 en de fotoverantwoording herhaald.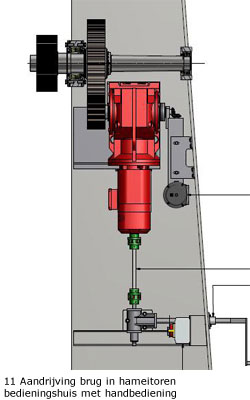
De hangstangen van de brug zijn bevestigd aan de voordwarsdrager. De lengte van de balansligger tussen draaipunten is gewijzigd van 8106 mm naar 9800 mm. De opstanden van de voetpaden zijn afgenomen van 130 mm naar 80 mm. Dit om het brugdek zo slank mogelijk te laten blijven. De heugelaangrijping is gewijzigd van 3006 mm naar 3200 mm vóór het hoofddraaipunt. Voor het bewegen van de brug is in elke hameitoren voorzien in een elektrische aandrijving bestaande uit een draaistroommotor met een reductor met een haakse overzetting. Iedere elektromotor, met een vermogen van 4 kW bij 1460 rpm en gevoed vanuit een gemeenschappelijke frequentieomzetter, is uitgerust met een geïntegreerde elektro-mechanische rem.
Daarnaast bezit de motor aan de bedieningshuiszijde een tweede aseinde waarmee, via een haakse overzetting, een handbediende slinger is te koppelen voor de handbeweging van de brug. De beide brugaandrijvingen zijn onderling mechanisch gekoppeld via het val. Er is geen gelijkloopregeling via de frequentieomzetter omdat de beide motoren gelijktijdig hieruit worden gevoed. De brug mag niet bewogen worden vanaf windkracht 7 (16,7 m/sec, uurgemiddelde op 10 m boven maaiveld).
De uitgaande as van een motorreductor (fig. 11 | 1) drijft via een tandwieloverbrenging een rondselas aan (fig. 11 | 2). Het rondsel op deze as is via een schamelstel verbonden met een rechte heugel van de ophaalbrug. In elke heugel bevindt zich nabij de bevestiging met het val een veerbuffer voor het verkrijgen van de gewenste opzetkracht van 15 kN op de opleggingen van het val. De standen van het val voor commando en controle retarderen (Voor-Voor-Op/Neer en Voor-Op/Neer) evenals de eindstanden (ES-Op/Neer) worden betrokken van een incrementele fail-safe encoder die op een uitgaande as van elke reductor is gemonteerd. De zes standmeldingen worden terug gemeld middels een ‘profisafe’ verbinding naar de PLC voor gebruik in het besturingsprogramma van de brug.
Voor detectie van de geheel gesloten stand is ook nog voorzien in twee sensoren aan de oplegzijde van het val. Deze sensoren, uitgevoerd als naderingsschakelaar, worden ingelezen op FAIL-SAFE ingangen van de PLC. Als bij bediening van deze sensoren een onjuiste terugmelding van de encoders plaats vindt, dan wordt de brugbeweging versneld elektrisch gestopt en wordt vervolgens de voeding van o.a. de brugmotoren en de remmen uitgeschakeld.
Een gebruikelijke techniek voor het versneld elektrisch stoppen van een beweging is bijvoorbeeld gelijkstroominjectie in de statorspoelen van de motoren. De kortsluitankermotoren werken dan als een elektrische rem omdat elke motor dan functioneert als een kortgesloten generator.
Op het schamelstel aan de bedieningshuiszijde bevindt zich een rolbediende schakelaar voor het vaststellen van de noodeindstand “Op”. Bij het aanspreken van deze noodeindstand wordt de brugbeweging versneld elektrisch gestopt en wordt vervolgens de voeding naar o.a. de brugmotoren en de remmen uitgeschakeld.
Fotoverantwoording
• Coeverse Plaaties, Herman Wessel: fig. 1 en 3
• Krant van Coevorden: fig. 5
• Gemeente Coevorden: fig. 2, 4, 6, 12, 13 en 14
• Wils van Soldt: fig. 7, 8, 15, 16, 17 en 18
• Dagblad van het Noorden: fig. 9
• Machinefabriek Emmen: fig. 10
• Ontwerpnota Bentheimerbrug: fig. 11