Wils van Soldt
Voor het automatiseren van een brugbeweging moet de besturingsinstallatie van de brug kunnen beschikken over discrete posities van het val om deze met de juiste snelheid zonder schade in de eindstanden te kunnen manoeuvreren. Daartoe worden langs het bewegingstraject van het val standdetectoren geplaatst, tot voor kort veelal in de uitvoeringsvorm van een schakelaar. Op deze wijze kan de positie van het val worden afgetast. Zo zijn er standdetectoren voor het inleiden van het retarderen voor de bewegingen openen en sluiten alsmede het vaststellen van de volledig geopende en de gesloten stand van het val. Teneinde te weten of er daadwerkelijk correct wordt geretardeerd zijn er ook detectoren die deze dynamische beweging controleren. In jargon heten de detectoren voor het starten van het retarderen, afhankelijk van de bewegingsrichting Voor- Voor-Op en Voor-Voor-Neer (afgekort resp. VVO en VVN). De detectoren voor het controleren van het retarderen hebben de naam Voor-Op en Voor-Neer (afgekort VO en VN). Voor de uiterste standen worden de namen Eindstand Op (EsOp) en Eindstand Neer (EsNeer) gebezigd.

Bij een uitvoeringsvorm van de standdetectoren als schakelaar zijn deze naast de gedwongen bediening ook redundant uitgevoerd. Het gedwongen bedienen slaat op de bedieningswijze zonder tussenkomst van een veer en direct zonder mogelijk falende overbrengingen of mechanieken. Het redundant uitvoeren betreft het meertallig aanwezig zijn van schakelaars, meestal tweevoudig, met een zelfde functie zodat ze elkaars reserve zijn. Uitgangspunt bij deze wijze van standdetectie is dat een falende detector nimmer mag leiden tot een gevaarlijke situatie of een maatschappelijk onaanvaardbare situatie. Het falen van een detector moet altijd leiden tot een situatie van de bediende stand van de detector. Door dit gedrag blijft de veiligheid gewaarborgd. Het onterecht signaleren van een bediende stand is helaas hinderlijk, echter niet gevaarlijk. Deze toestand is bekend onder de naam Short Mode failure (SMF). Het onterecht geen signaal geven, een zgn. Open Mode Failure, (OMF) leidt tot gevaarlijke situaties en moet te allen tijde worden voorkomen. Het gebruik van (in serie geschakelde) verbreekcontacten van de redundante standschakelaars geeft
automatisch detectie van een los contact of een draadbreuk. Een sluiting in de aansluitkabel verstoort de verbrekende werking van het verbreekcontact. Echter door de redundante uitvoering van de standschakelaars alsmede de afzonderlijke bekabeling en kabelloop van de aansluitkabel van elke detector wordt dit ondervangen. Bij een uitvoeringsvorm van standdetectoren als inductieve naderingsschakelaar is het t.a.v. de veiligheid vereist dat deze intrinsiek veilig is. Dit houdt in dat de detector hetzelfde gedrag vertoont bij een defect zoals de hiervoor beschreven toepassing van mechanisch gedwongen bediende redundante standschakelaars. Het voortschrijden van de techniek heeft
ertoe geleid dat standdetectie van brugklappen nu ook op een meer geavanceerde wijze kan geschieden zonder dat er tekort wordt gedaan aan het principe van veiligheid en bedrijfszekerheid van gedwongen bediende detectoren. Dit is
mogelijk dankzij de introductie van veiligheidstechnieken in elektronische besturingen en schakelingen. Het betreft hier de zgn. Safety Integrity Lever, afgekort SIL. Dit is een normatieve methode voor de beoordeling van elektrische, elektronische en programmeerbare elektronische (E/E/PE) systemen m.b.t. de betrouwbaarheid en veiligheid van de procesvoortgang. SIL is een onderdeel van o.a. de normering IEC 62061 die er speciaal is voor de machinebouw. Het
voordeel van het toepassen van encoders (zie verder) is het eenvoudiger inregelen van het positiesysteem in vergelijking met zes redundante standschakelaars. Daarnaast heeft men het voordeel dat men op elk punt van het bewegingstraject van het val beschikt over de positie van het val.

ROTERENDE ENCODERS
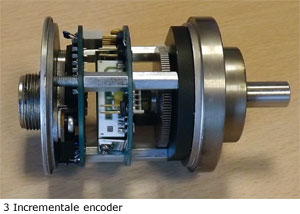
In plaats van afzonderlijke standdetectoren te gebruiken voor de posities van een brugklap maakt men nu ook gebruik van roterende (hoek)encoders die een pulssignaal of een digitaal signaal genereren bij rotatie van de ingaande as. Deze apparaten worden via een mechanische verbinding met het machinewerk van de brug gekoppeld. Bij encoders met een afzonderlijke uitgaande as geschiedt dit bijvoorbeeld met een balg- of schijvenkoppeling. De zgn. holle as encoders worden bevestigd op een passende uitgaande as van het machinewerk. Afhankelijk van de gebruikersomstandigheden kunnen de encoders zijn voorzien van één of meerdere connectoraansluitingen voor de elektrische voeding, de gegenereerde meetwaarden, statusmeldingen e.d.. Encoders zijn er in single turn of in multiturn uitvoering. Afhankelijk van de uitvoeringsvorm kunnen encoders een incrementaal signaal (pulssignaal) of een absoluut digitaal signaal genereren. Ook zijn er encoders die sinus- en cosinusvormige signalen genereren. Tenslotte onderscheidt men encoders die werken volgens een magnetisch meetprincipe of een optisch meetprincipe. In dit artikel wordt slechts de optische digitale variant beschouwd.
Bij het optische meetprincipe maakt men gebruik van een inwendige codeschijf die bestaat uit een ronde onbreekbare kunststof schijf waarop langs fotografische weg een concentrisch patroon van transparante en ondoorzichtige vensters is aangebracht. Infrarood licht van een LED (Light Emitting Diode) schijnt door de codeschijf op een array van fotogevoelige cellen. Als de as van de gever draait wordt een (unieke) combinatie van fotogevoelige cellen belicht of niet belicht door het vensterpatroon op de schijf.
ROTERENDE INCREMENTALE ENCODERS
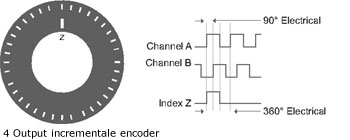
Rotende incrementale encoders zijn in wezen pulsgevers, meestal in een multiturn uitvoeringsvorm. Per omwenteling van de ingaande as worden door het apparaat pulsen gegenereerd die via een connector met kabel worden toegevoerd aan een elektronische verwerkingseenheid. Veelal worden er twee pulstreinen gegenereerd, de zgn. A en B pulsen. Deze pulsen zijn 900 t.o.v. elkaar verschoven. Beschouwing van de volgorde van binnenkomst van de pulsvolgorde in de verwerkingseenheid geeft een discriminatie van de draairichting. Voor het eenvoudig kunnen instellen van het nulpunt van de positiemeting zijn er incrementale encoders die een z(ero)-puls genereren bij elke omwenteling van de encoder-as.
De pulstreinen worden opgeslagen in een geheugen. De som van de opgeslagen pulsen is een maat voor de positie van de brugklap. Om altijd te kunnen beschikken over de positie van de klap moet worden voorkomen dat het geheugen door een defect spanningsloos wordt waardoor de positieinformatie van de brugklap verloren gaat. Elektrisch voeden vanuit een no-break unit of het systeem voorzien van een battery-backup is dus essentieel voor een betrouwbaar incrementaal meetsysteem. Met de mechanische overzetverhouding tussen de brugklap en de roterende optische schijf in de encoder alsmede het aantal pulsen per omwenteling van de ingaande as van de encoder ligt de resolutie van de positiemeting vast. Voor optische codegevers zijn 360 tot 2500 pulsen per omwenteling niet ongewoon. In de halfgeleiderindustrie komen zelfs resoluties voor van 65.000 pulsen per omwenteling.
Door beschouwing van het aantal pulsen per seconde wordt de snelheid van het bewegende object verkregen, het sommeren van het verkregen aantal pulsen levert de positie van het bewegende object.
ROTERENDE ABSOLUTE ENCODERS
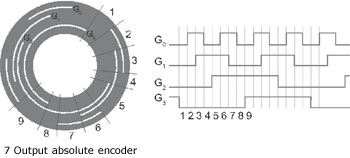
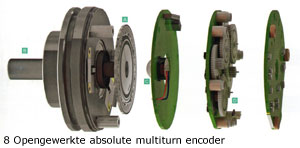
Bij deze encoders onderscheidt men de uitvoeringsvormen single turn en multiturn. De single turn encoders genereren een aantal absolute digitale codes bij een enkele asomwenteling van de ingaande as met slechts één codeschijf. Resoluties van 1024 binaire codes of meer per omwenteling zijn geen uitzondering. Voor multiturn apparaten wordt een set extra codeschijven toegevoegd die met een tandwieloverbrenging onderling worden gekoppeld. Als de ingaande as van de encoder roteert, draaien de toegevoegde schijven als de cijferraderen in een kilometerteller. De rotatiepositie van elke schijf wordt optisch afgetast waarbij de binaire gegenereerde meetwaarde overeen stemt met de positie van de ingaande as van de encoder i.c. de positie van het bewegende object. Afhankelijk van de uitvoering komen resoluties voor tot 16 bits codes (216) overeenkomend met 65.536 stappen of 0,0050. De binaire code die door een encoder wordt gegenereerd kan worden gepresenteerd in verschillende hoedanigheden zoals een binair getal, een BCD-code (Binairy Coded Decimals), een Gray-code e.d. De genoemde codes zijn per getal een aantal enen en nullen die elk hun eigen bewerking nodig hebben om een concrete decimale waarde voor te stellen. Bij de binaire code stelt elk bit een macht van 2 voor. In de BCD-code zijn de bits gegroepeerd in clusters van vier bits die elk een decimaal voorstellen. Per decimaal wordt dus geteld van de waarde nul (0000) tot de waarde negen (1001). De binaire en de BCD-code zijn eenvoudig uitleesbaar maar hebben het nadeel dat bij overgang naar een volgend getal meerdere bits tegelijk moeten veranderen waarbij zich mogelijke ongewenste tussenresultaten kortstondig voor kunnen doen. Als voorbeeld: de stap van 1 (0001) naar stap 2 (0010) geeft binnen de stap veranderingen van twee bits.
De Gray-code geeft bij het stappen naar een volgende waarde altijd maar een bit verandering in de stap. Merkwaardige tussenresultaten zijn hierdoor uitgesloten. Aan de bits in de Graycode kunnen dus niet zondermeer de machten van 2 worden toegekend afhankelijk van hun positie in de code. Er zal dus een vertaalslag moeten plaatsvinden om te komen tot een gewogen getalpresentatie.


Informatiebronnen
Documentatie “Position and motion sensors” van Posital Fraba
Informatieve bespreking met Dick Brouwer, TSB-Bescom Duiven
Fotoverantwoording
Posital Fraba afb. 2, 4, 7, 8
Wils van Soldt afb. 1, 3, 5, 6
Download hier het artikel in pdf-formaat ![]()